
emissionsfrei | bedürfnisorientiert | individuell
Wir schaffen wir es, unseren aktuell hohen Individualisierungsgrad in der Mobilität in Zukunft emissionsfreundlich und klimaneutral zu gestalten?
Verlinkung Projektunterseiten Schmidt


Ready for Smart City Robots?
Mit unserem Projekt Ready for Smart City Robots? leisten wir einen entscheidenden Beitrag, um unsere (Klein-) Städte zukunftsfähig und klimafreundlich zu gestalten. Wir erforschen die Einsatzmöglichkeiten autonomer Mobilitätssysteme und Lieferdienste in kleinstädtischen, eher ländlich geprägten Regionen.
Autonome Mobilitätssysteme oder Lieferdienste meint dabei Mikromobile, die selbstständig auf Geh- und Radwegen unterwegs sind. SIe bieten - auch feranb der großen Städte - eine vielversprechende Alternative, die insbesondere im Hinblick auf Lebensqualität und Daseinsvorsorge große Entwicklungspotentiale bietet.
Um den potentiellen Erfolg dieser Mikromobile genau beurteilen zu können, bedarf es zunächste einer umfassenden (Bestands-) Aufnahme der Umgebung - dazu gehören beispielsweise minimale Wegbreiten, Passant:innenaufkommen sowie Sichtachsen. Abseits großer Städte stehen diese Daten jedoch nur unvollständig bereit und sind heterogen strukturiert, sodass sie keine (belastbare) Grundlage für den erfolgreichen Einsatz der Mikromobile bieten.
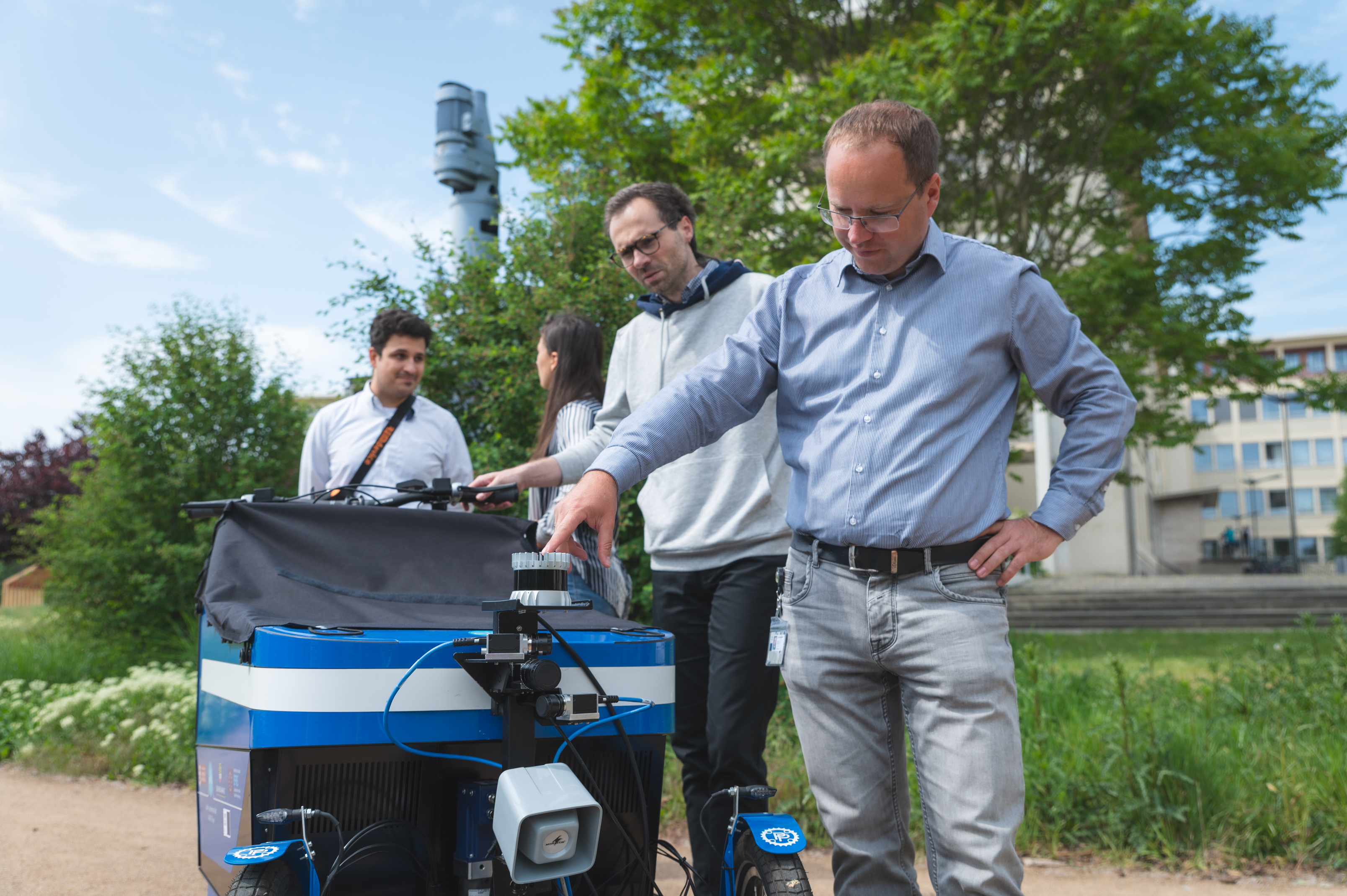
Mit unserem Projekt Ready for Smart City Robots? verfolgen wir zwei fahrradgebundene Strategien zur Erhebung dieser Daten. Dabei integrieren wir einerseits multimodale Sensorsets in Leihfahrräder und binden andererseits eine Community aus Freiwilligen ein, die die Daten mittels Smartphone-App am Fahrrad erheben. Außerdem evaulieren den Prozess - hinsichtlich der Effizienz und Qualität der ermittelten Informationen - anhand konkreter Szenarien (autonome Leihfahrräder | Lieferroboter) und Smart City|Town|Village Anwendungen und hinsichtlich ihrer räumlichen Abdeckung sowie der Abbildungsvielfalt.
Indem wir notwendige Parameter sowie - aktuell noch vorhandene - Lücken in den verfügbaren Daten an unterschiedlichen Standorten identifizieren, leisten wir einen wichtigen Beitrag zur datengetriebenen Entwicklung intelligenter Mobilitäts- und Logistikkonzepte.
"Mit diesem Projekt leisten wir einen wichtigen Beitrag für eine zukunftsfähige und klimafreundliche Mobilität."Prof. Dr. Stephan Schmidt

Cube Stories | 06 | Stephan Schmidt
Aktiv zur Mobilitätswende beitragen - das ist das persönliche Anliegen von Prof. Dr. Stephan Schmidt. Was das genau bedeutet und woran er gerade forscht, das erfahren Sie in unseren Cube Stories.





OPTmicro
OpenTrainingData für automatisierte und autonome Mikromobile
Mikromobile können CO2-Emissionen und Verkehr reduzieren. Bisherige Entwicklungen von automatisiertem Fahren sind sehr stark auf Kfz fokussiert. Daher gibt es bisher keinen offenen Datensatz, der das Entwickeln von autonomen Fahrfunktionen im Mikromobilkontext abseits von Kfz-Fahrbahnen ermöglicht. Somit können Early-Stage-Entwicklerteams und Universitäten nur sehr schwer erste Verfahren entwickeln und KI-/ML- Anwendungen trainieren.
Projektziel
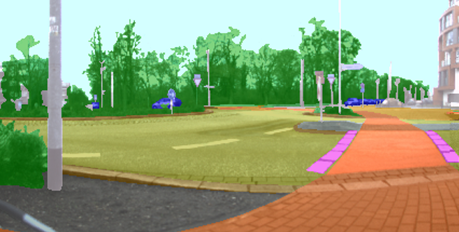
Ziel von OPTmicro ist, einen offenen Trainingsdatensatz für automatisierte und autonome Mikromobile zu erheben, aufzuarbeiten und der Wissenschaftscommunity sowie Unternehmen zur Verfügung zu stellen. Dadurch wird Entwicklern von Mobilitätslösungen ein Datensatz frei als offener Datensatz unter einer Open-Source-Lizenz zur Verfügung gestellt, der auf die anwendungsspezifischen Erfordernisse wie das Fahren abseits von Kfz-Fahrbahnen eingeht.
Durchführung
Das Projekt umfasst die Ausstattung und Modifikation eines bestehenden Versuchsträgers sowie die Konzeption einer Datensammelstrategie. Damit wird ein Datensatz in verschiedenen Verkehrssituationen in unterschiedlichen Operationsgebieten und -zeiträumen erhoben. Die Daten werden manuell und teilautomatisiert aufbereitet und als offener Datensatz veröffentlicht. Zusätzlich werden auf Basis des Datensatzes KI-Modelle als Referenz trainiert, welche ebenfalls öffentlich zugänglich gemacht werden.



Kontakt

Fotos: Christian Auspurg | HoMe